基地式CAN总线电动执行器设计
[10-21 14:57:44] 来源:http://www.592dz.com 接口定义 阅读:9348次
概要:0505S-2W的驱动电流最大可达0.5 A,完全能够驱动整个电路。3 系统软件设计该系统软件设计是根据系统功能要求而设计。基地式CAN总线智能电动执行器的软件程序设计分为:通信端和控制端。采用模块化设计,使得系统软件结构更清晰,易于理解,同时便于调试、连接、修改和移植。该系统软件主要分为电机控制及算法、键盘及显示、CAN总线通信3部分。开发系统使用C语言和汇编语言进行软件编程,这样可以缩短开发周期,降低开发成本,而且易于维护系统软件,提高可靠性。系统控制端程序流程如图4所示。电机控制及算法部分则根据现场检测信号和阀位反馈实现电机正反转控制,考虑到执行机构动作的延迟,采用不完全微分PID算法。键盘及显示模块实现系统的参数设置及显示功能。通信端通过CAN总线实现上位机监控及现场仪表之间的通信。系统为了具有较好的实时性,通信端接收信息采用中断控制方式,通信端程序流程图如图5所示。其中CANBUS中断接收子程序是根据SJA1000的中断寄存器内容做出相应处理,如果是接收中断,则将数据接收至MCU的内部接收缓冲区并保存至ROM及双口RAM。CANBUS发送子程序将SJA1000发送缓冲区中的内容通过SJA1000发送给相应的智能节点。4 结论基地式CAN总线电动执行机构应用单片微型计算机实现
基地式CAN总线电动执行器设计,http://www.592dz.com2.5 电源电路
整个CAN智能电动执行器系统设计共使用3路电源:第1路主要是向微控制器控制电路、键盘显示、双口RAM及CAN控制等提供+5 V电压;第2路是向CAN通信模块和电机驱动电路的光耦隔离提供+5 V电源;第3路是向电机控制电路继电器提供+24 V电源。电源器件LD03-10B24和D240505S-2W将交流220 V电压转换为电机控制继电器所需的+24 V电压,又通过D240505S-2W将+24 V电压转换为第1路、第2路所需的+5 V电压。
整个系统的电源由220 V交流电源提供,因为这是220 V驱动的交流伺服电机,为了使整个电源输入设计简洁,可以将其余两路的所需电源也由交流电源220 V转换,这样整个系统的直流电源则由DC-DC转换电源模块D240505S-2W提供。D240505S-2W的驱动电流最大可达0.5 A,完全能够驱动整个电路。
3 系统软件设计
该系统软件设计是根据系统功能要求而设计。基地式CAN总线智能电动执行器的软件程序设计分为:通信端和控制端。采用模块化设计,使得系统软件结构更清晰,易于理解,同时便于调试、连接、修改和移植。该系统软件主要分为电机控制及算法、键盘及显示、CAN总线通信3部分。开发系统使用C语言和汇编语言进行软件编程,这样可以缩短开发周期,降低开发成本,而且易于维护系统软件,提高可靠性。系统控制端程序流程如图4所示。

电机控制及算法部分则根据现场检测信号和阀位反馈实现电机正反转控制,考虑到执行机构动作的延迟,采用不完全微分PID算法。键盘及显示模块实现系统的参数设置及显示功能。通信端通过CAN总线实现上位机监控及现场仪表之间的通信。
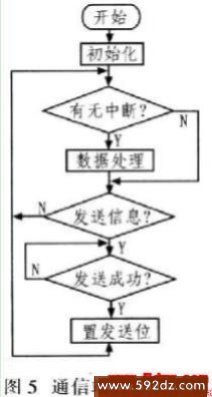
系统为了具有较好的实时性,通信端接收信息采用中断控制方式,通信端程序流程图如图5所示。其中CANBUS中断接收子程序是根据SJA1000的中断寄存器内容做出相应处理,如果是接收中断,则将数据接收至MCU的内部接收缓冲区并保存至ROM及双口RAM。CANBUS发送子程序将SJA1000发送缓冲区中的内容通过SJA1000发送给相应的智能节点。
4 结论
基地式CAN总线电动执行机构应用单片微型计算机实现本地PID控制,减少了通讯次数,避免与控制设备通讯所发生的错误,并且采用CAN总线技术使系统数据出错率降低,发生严重错误时在不影响其他节点的情况下,具有自动关闭功能。经测试表明,该CAN总线电动执行器控制精度高稳定性、可靠性好,而且操作控制简单。
- 最新《接口定义》